Nello spazio, l'aereo può essere impostato da diversimodi (un punto e un vettore, due punti e un vettore, tre punti, ecc.). È con questo in mente che l'equazione dell'aereo può avere varie forme. Inoltre, se vengono soddisfatte determinate condizioni, i piani possono essere paralleli, perpendicolari, intersecanti, ecc. Ne parleremo in questo articolo. Impareremo come redigere l'equazione generale dell'aereo e altro ancora.
Forma normale dell'equazione
Supponiamo che ci sia uno spazio R3, che ha un sistema di coordinate XYZ rettangolare. Definiamo un vettore α, che verrà rilasciato dal punto iniziale O. Attraverso la fine del vettore α, traccia un piano P, che sarà perpendicolare ad esso.
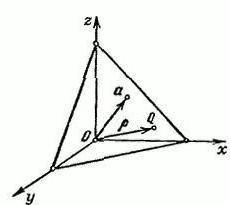
Indichiamo su un punto arbitrario Q = (x, y, z). Segniamo il raggio vettore del punto Q con la lettera p. In questo caso, la lunghezza del vettore α è uguale a p = IαI e Ʋ = (cosα, cosβ, cosγ).
Questo è un vettore unitario a cui è direttolato, così come il vettore α. α, β e γ sono gli angoli che si formano tra il vettore Ʋ e le direzioni positive degli assi spaziali x, y, z, rispettivamente. La proiezione di qualsiasi punto QϵП sul vettore Ʋ è un valore costante, che è uguale a p: (p, Ʋ) = p (p≥0).
L'equazione sopra ha senso quando p = 0.L'unica cosa è che il piano P in questo caso intersecherà il punto O (α = 0), che è l'origine, e il vettore unitario Ʋ emesso dal punto O sarà perpendicolare a P, nonostante la sua direzione, il che significa che il vettore Ʋ è determinato con precisione al segno. L'equazione precedente è l'equazione del nostro piano P, espressa in forma vettoriale. Ma in coordinate, sarà simile a questo:

P qui è maggiore o uguale a 0. Abbiamo trovato l'equazione del piano nello spazio nella forma normale.
Equazione generale
Se moltiplichiamo l'equazione in coordinate per un numero diverso da zero, otteniamo un'equazione equivalente a quella data, che definisce lo stesso piano. Sarà simile a questo:

Qui A, B, C sono numeri che sono contemporaneamente diversi da zero. Questa equazione viene definita equazione del piano generale.
Equazioni dei piani. Casi speciali
L'equazione generale può essere modificata in presenza di condizioni aggiuntive. Consideriamo alcuni di loro.
Supponiamo che il coefficiente A sia uguale a 0. Ciò significa che questo piano è parallelo al dato asse Ox. In questo caso, la forma dell'equazione cambierà: Vu + Cz + D = 0.
Allo stesso modo, la forma dell'equazione cambierà nelle seguenti condizioni:
- Innanzitutto, se B = 0, l'equazione cambierà in Ax + Cz + D = 0, che indicherà che è parallela all'asse Oy.
- In secondo luogo, se C = 0, l'equazione viene trasformata in Ax + Vy + D = 0, che parlerà di parallelismo all'asse Oz dato.
- Terzo, se D = 0, l'equazione apparirà come Ax + Vy + Cz = 0, il che significa che il piano interseca O (origine).
- In quarto luogo, se A = B = 0, l'equazione cambia in Cz + D = 0, che risulterà parallela a Oxy.
- Quinto, se B = C = 0, l'equazione diventa Ax + D = 0, il che significa che il piano per Oyz è parallelo.
- Sesto, se A = C = 0, l'equazione assumerà la forma Vy + D = 0, ovvero riporterà il parallelismo a Oxz.
Vista dell'equazione in segmenti
Nel caso in cui i numeri A, B, C, D siano diversi da zero, la forma dell'equazione (0) può essere la seguente:
x / a + y / b + z / c = 1,
in cui a = -D / A, b = -D / B, c = -D / C.
Di conseguenza, otteniamo l'equazione dell'aereo in segmenti. Vale la pena notare che questo piano intersecherà l'asse del Bue in un punto con coordinate (a, 0,0), Oy - (0, b, 0) e Oz - (0,0, c).

Tenendo conto dell'equazione x / a + y / b + z / c = 1, è facile rappresentare visivamente la posizione del piano rispetto a un dato sistema di coordinate.
Coordinate vettoriali normali
Il vettore normale n al piano P ha coordinate che sono i coefficienti dell'equazione generale di questo piano, cioè n (A, B, C).

Per determinare le coordinate della normale n, è sufficiente conoscere l'equazione generale del piano dato.
Quando si utilizza un'equazione del segmento di linea, cheha la forma x / a + y / b + z / c = 1, poiché quando si utilizza l'equazione generale, è possibile scrivere le coordinate di qualsiasi vettore normale in un dato piano: (1 / a + 1 / b + 1 / c ).
Vale la pena notare che il vettore normale aiutarisolvere vari problemi. I problemi più comuni includono il problema di provare la perpendicolarità o il parallelismo dei piani, il problema di trovare gli angoli tra i piani o gli angoli tra i piani e le linee.
Vista dell'equazione del piano secondo le coordinate del punto e del vettore normale
Un vettore diverso da zero n perpendicolare a un dato piano è chiamato normale (normale) per un dato piano.
Supponiamo che nello spazio delle coordinate (sistema di coordinate rettangolari) Oxyz sia dato:
- punto Мₒ con coordinate (xₒ, yₒ, zₒ);
- vettore zero n = A * i + B * j + C * k.

È necessario elaborare un'equazione per un piano che passerà per il punto Mₒ perpendicolare alla normale n.
Nello spazio, scegli un punto arbitrario elo denotiamo con M (xy, z). Sia il vettore del raggio di un punto qualsiasi M (x, y, z) r = x * i + y * j + z * k, e il vettore del raggio del punto Mₒ (xₒ, yₒ, zₒ) - rₒ = xₒ * io + yₒ * j + zₒ * k. Il punto M apparterrà ad un dato piano se il vettore МₒМ è perpendicolare al vettore n. Scriviamo la condizione di ortogonalità usando il prodotto scalare:
[МₒМ, n] = 0.
Poiché МₒМ = r - rₒ, l'equazione vettoriale dell'aereo sarà simile a questa:
[r - rₒ, n] = 0.
Questa equazione può avere un'altra forma.Per questo, vengono utilizzate le proprietà del prodotto scalare e il lato sinistro dell'equazione viene trasformato. [r - rₒ, n] = [r, n] - [rₒ, n]. Se [rₒ, n] è indicato come c, si otterrà la seguente equazione: [r, n] - c = 0 o [r, n] = c, che esprime la costanza delle proiezioni sul vettore normale dei vettori del raggio di punti dati che appartengono al piano.
Ora puoi ottenere la forma coordinata della scrittura dell'equazione vettoriale del nostro piano [r - rₒ, n] = 0. Poiché r - rₒ = (x - xₒ) * i + (y - yₒ) * j + (z - zₒ ) * k, e n = A * i + B * j + C * k, abbiamo:

Si scopre che abbiamo un'equazione di un piano passante per un punto perpendicolare alla normale n:
A * (x- xₒ) + B * (y– yₒ) C * (z - zₒ) = 0.
La forma dell'equazione del piano secondo le coordinate di due punti e un vettore allineato al piano
Definiamo due punti arbitrari M '(x', y ', z') e M ″ (x ″, y ″, z ″), nonché un vettore a (a ′, a ″, a).
Ora saremo in grado di tracciare un'equazione di un dato piano, che passerà per i punti esistenti M ′ e M ″, così come qualsiasi punto M con coordinate (x, y, z) parallele a un dato vettore a.
Inoltre, i vettori M′M = {x-x ′; y-y ′; zz ′} e M ″ M = {x ″ -x ′; y ″ -y ′; z ″ -z ′} devono essere complanari con il vettore a = (a ′, a ″, a ‴), il che significa che (M′M, M ″ M, a) = 0.
Quindi, la nostra equazione di un aereo nello spazio sarà simile a questa:

Vista dell'equazione di un piano che interseca tre punti
Diciamo che abbiamo tre punti:(x ′, y ′, z ′), (x ″, y ″, z ″), (x ‴, y ‴, z ‴) che non appartengono a una linea retta. È necessario scrivere l'equazione del piano che passa per i tre punti dati. La teoria della geometria afferma che questo tipo di piano esiste davvero, solo che è l'unico e inimitabile. Poiché questo piano interseca il punto (x ′, y ′, z ′), la forma della sua equazione sarà la seguente:

Qui A, B, C sono allo stesso tempo diversi da zero. Inoltre, il piano dato interseca altri due punti: (x ″, y ″, z ″) e (x ‴, y ‴, z ‴). A questo proposito, devono essere soddisfatte le seguenti condizioni:
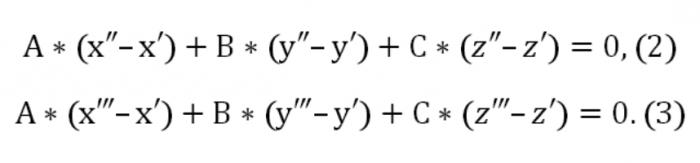
Ora possiamo comporre un sistema omogeneo di equazioni (lineari) con incognite u, v, w:
Nel nostro caso, x, yo z è arbitrariopunto che soddisfa l'equazione (1). Tenendo conto dell'equazione (1) e del sistema di equazioni (2) e (3), il sistema di equazioni indicato nella figura sopra è soddisfatto dal vettore N (A, B, C), che non è banale. Ecco perché il determinante di questo sistema è uguale a zero.

L'equazione (1), che abbiamo ottenuto, èè l'equazione dell'aereo. Passa esattamente per 3 punti ed è facile da controllare. Per fare ciò, dobbiamo espandere il nostro determinante con elementi situati nella prima riga. Dalle proprietà esistenti del determinante segue che il nostro piano interseca simultaneamente tre punti inizialmente specificati (x ′, y ′, z ′), (x ″, y ″, z ″), (x ‴, y ‴, z ‴) . Cioè, abbiamo risolto il compito che ci era stato assegnato.
Angolo diedro tra i piani
L'angolo diedro èuna figura geometrica spaziale formata da due semipiani che emanano da una linea retta. In altre parole, questa è una parte dello spazio che è limitata da questi semipiani.
Supponiamo di avere due piani con le seguenti equazioni:

Sappiamo che i vettori N = (A, B, C) eN¹ = (А¹, В¹, С¹) sono perpendicolari secondo i piani dati. A questo proposito, l'angolo φ tra i vettori N e N¹ è uguale all'angolo (diedro), che si trova tra questi piani. Il prodotto dot è:
NN¹ = | N || N¹ | cos φ,
proprio perché
cosφ = NN¹ / | N || N¹ | = (AA¹ + BB¹ + CC¹) / ((√ (A² + B² + C²)) * (√ (A¹) ² + (B¹) ² + (C¹) ²)).

È sufficiente tener conto che 0≤φ≤π.
Infatti, due piani che si intersecano formano due angoli (diedri): φ1 e φ2... La loro somma è uguale a π (φ1+ φ2= π). Per quanto riguarda i loro coseni, i loro valori assoluti sono uguali, ma differiscono nei segni, cioè cos φ1= -cos φ2... Se nell'equazione (0) sostituiamo A, B e C con i numeri -A, -B e -C, rispettivamente, l'equazione che otteniamo definirà lo stesso piano, l'unico angolo φ nell'equazione cos φ = NN1/ | N || N1| sarà sostituito da π-φ.
Equazione del piano perpendicolare
I piani sono chiamati perpendicolari, traquale angolo è di 90 gradi. Usando il materiale descritto sopra, possiamo trovare l'equazione di un piano perpendicolare a un altro. Supponiamo di avere due piani: Ax + By + Cz + D = 0 e A¹x + B¹y + C¹z + D = 0. Possiamo affermare che saranno perpendicolari se cosφ = 0. Ciò significa che NN¹ = AA¹ + BB¹ + CC¹ = 0.
Equazione del piano parallelo
Paralleli sono due piani che non contengono punti comuni.
La condizione affinché i piani siano paralleli (le loro equazionilo stesso della sottosezione precedente) è che i vettori N e N¹, che sono perpendicolari ad essi, sono collineari. Ciò significa che sono soddisfatte le seguenti condizioni di proporzionalità:
A / A¹ = B / B¹ = C / C¹.
Se le condizioni di proporzionalità sono estese - A / A¹ = B / B¹ = C / C¹ = DD¹,
questo indica che questi piani coincidono. Ciò significa che le equazioni Ax + By + Cz + D = 0 e A¹x + B¹y + C¹z + D¹ = 0 descrivono un piano.
Distanza al piano dal punto
Supponiamo di avere un piano P, che è datoequazione (0). È necessario trovare la distanza dal punto con coordinate (xₒ, yₒ, zₒ) = Qₒ. Per fare ciò, è necessario portare l'equazione del piano P in una forma normale:
(p, v) = p (p≥0).
In questo caso, ρ (x, y, z) èil vettore del raggio del nostro punto Q, situato su P, p è la lunghezza della perpendicolare P, che è stata rilasciata dal punto zero, v è il vettore unitario, che si trova nella direzione a.
Differenza ρ-ρº del vettore raggio di un punto Q = (x, y, z), appartenente a П, nonché vettore raggio di un dato punto Q0= (xₒ, yₒ, zₒ) è un vettore il cui valore assoluto della proiezione su v è uguale alla distanza d, che deve essere trovata da Q0= (xₒ, yₒ, zₒ) a P:
D = | (ρ-ρ0, v) |, ma
(ρ-ρ0, v) = (ρ, v) - (ρ0, v) = р– (ρ0, v).
Quindi si scopre
d = | (ρ0, v) -p |.
Visto ora per calcolare la distanza d da Q0 al piano P, è necessario utilizzare la forma normale dell'equazione del piano, mentre si trasferisce a sinistra di p e si sostituisce (xₒ, yₒ, zₒ) nell'ultimo invece di x, y, z.
Quindi, troveremo il valore assoluto dell'espressione risultante, cioè il d desiderato.
Usando il linguaggio dei parametri, otteniamo l'ovvio:
d = | Axₒ + Byₒ + Czₒ | / √ (A² + B² + C²).
Se un dato punto Q0 è sull'altro lato del piano P, come l'origine, quindi tra il vettore ρ-ρ0 e v è un angolo ottuso, quindi:
d = - (ρ-ρ0, v) = (ρ0, v) -p> 0.
Nel caso in cui il punto Q0 insieme all'origine si trova sullo stesso lato di P, quindi l'angolo creato è acuto, cioè:
d = (ρ-ρ0, v) = р - (ρ0, v)> 0.
Di conseguenza, risulta che nel primo caso (ρ0, v)> р, nel secondo (ρ0, v) <p.
Il piano tangente e la sua equazione
Il piano tangente alla superficie nel punto di tangenza Mº è il piano contenente tutte le possibili tangenti alle curve tracciate attraverso questo punto sulla superficie.
Con questa forma dell'equazione della superficie F (x, y, z) = 0, l'equazione del piano tangente nel punto tangente Mº (xº, yº, zº) sarà simile a questa:
FX(xº, yº, zº) (x- xº) + FX(xº, yº, zº) (y- yº) + FX(xº, yº, zº) (z-zº) = 0.
Se impostiamo la superficie in forma esplicita z = f (x, y), il piano tangente sarà descritto dall'equazione:
z-zº = f (xº, yº) (x- xº) + f (xº, yº) (y-yº).
Intersezione di due piani
Il sistema si trova nello spazio tridimensionalecoordinate (rettangolari) Oxyz, vengono forniti due piani P ′ e P ″ che si intersecano e non coincidono. Poiché qualsiasi piano in un sistema di coordinate rettangolari è determinato dall'equazione generale, assumeremo che P ′ e P ″ siano dati dalle equazioni Ax + B′y + C′z + D ′ = 0 e A ″ x + B ″ y + C ″ z + D ″ = 0. In questo caso, abbiamo il normale n ′ (A ′, B ′, C ′) del piano P ′ e il normale n ″ (A ″, B ″, C ″) del piano P ″. Poiché i nostri piani non sono paralleli e non coincidono, questi vettori non sono collineari. Usando il linguaggio della matematica, possiamo scrivere questa condizione come segue: n ′ ≠ n ″ ↔ (A ′, B ′, C ′) ≠ (λ * A ″, λ * B ″, λ * C ″), λϵR. Sia la retta che si trova all'intersezione di P ′ e P ″ sarà indicata con la lettera a, in questo caso a = P ′ ∩ P ″.
a è una linea retta composta da un insieme di tutti i puntipiani (comuni) P 'e P ″. Ciò significa che le coordinate di qualsiasi punto appartenente alla retta a devono soddisfare simultaneamente le equazioni A'x + B'y + C'z + D '= 0 e A ″ x + B ″ y + C ″ z + D ″ = 0. Ciò significa che le coordinate del punto saranno una particolare soluzione del seguente sistema di equazioni:

Di conseguenza, risulta che la soluzione (generale) di questoil sistema di equazioni determinerà le coordinate di ciascuno dei punti della retta, che fungerà da punto di intersezione di P ′ e P ″, e determinerà la retta a nel sistema di coordinate Oxyz (rettangolare) nello spazio.