I rymden kan planet ställas in av olikasätt (en punkt och en vektor, två punkter och en vektor, tre punkter, etc.). Det är med detta i åtanke att ekvationen för planet kan ha olika former. Om vissa villkor är uppfyllda kan planen också vara parallella, vinkelräta, skärande etc. Vi kommer att prata om detta i den här artikeln. Vi kommer att lära oss att rita upp den allmänna ekvationen för planet och mer.
Normal form av ekvationen
Antag att det finns ett mellanslag R3, som har ett rektangulärt XYZ -koordinatsystem. Låt oss definiera en vektor α, som kommer att släppas från den ursprungliga punkten O. Genom slutet av vektorn α, rita ett plan P, som kommer att vara vinkelrätt mot det.
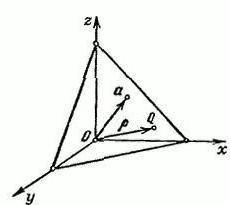
Vi betecknar på en godtycklig punkt Q = (x, y, z). Låt oss signera radievektorn för punkten Q med bokstaven p. I detta fall är längden på vektorn a lika med p = IαI och Ʋ = (cosα, cosβ, cosγ).
Detta är en enhetsvektor som är riktad tillsida, liksom vektorn α. α, β och γ är de vinklar som bildas mellan vektorn Ʋ och de positiva riktningarna för rymdaxlarna x, y, z, respektive. Projektionen av någon punkt QϵП på vektorn Ʋ är ett konstant värde, vilket är lika med p: (p, Ʋ) = p (p≥0).
Ovanstående ekvation är vettig när p = 0.Det enda är att planet P i detta fall kommer att korsa punkten O (α = 0), som är ursprunget, och enhetsvektorn Ʋ som avges från punkten O kommer att vara vinkelrät mot P, trots dess riktning, vilket innebär att vektorn Ʋ bestäms exakt med tecknet. Den föregående ekvationen är ekvationen för vårt plan P, uttryckt i vektorform. Men i koordinater kommer utseendet att se ut så här:

P här är större än eller lika med 0. Vi har hittat ekvationen för planet i rymden i normal form.
Allmän ekvation
Om ekvationen i koordinater multipliceras med valfritt tal som inte är noll, får vi en ekvation ekvivalent med den givna, som definierar samma plan. Det kommer att se ut så här:

Här är A, B, C nummer som är noll samtidigt. Denna ekvation kallas den allmänna planekvationen.
Ekvationer för flygplan. Speciella fall
Den allmänna ekvationen kan modifieras i närvaro av ytterligare förhållanden. Låt oss ta en titt på några av dem.
Antag att koefficienten A är lika med 0. Detta betyder att detta plan är parallellt med den givna axeln Ox. I detta fall kommer ekvationsformen att ändras: Vy + Cz + D = 0.
På samma sätt kommer ekvationsformen att ändras under följande förhållanden:
- Först, om B = 0, kommer ekvationen att ändras till Ax + Cz + D = 0, vilket indikerar att den är parallell med Oy -axeln.
- För det andra, om C = 0, omvandlas ekvationen till Ax + Vy + D = 0, vilket kommer att tala om parallellitet till den givna axeln Oz.
- För det tredje, om D = 0, kommer ekvationen att se ut som Ax + Vy + Cz = 0, vilket innebär att planet skär O (ursprung).
- För det fjärde, om A = B = 0, kommer ekvationen att ändras till Cz + D = 0, vilket kommer att visa sig parallellt med Oxy.
- För det femte, om B = C = 0, blir ekvationen Ax + D = 0, vilket innebär att planet till Oyz är parallellt.
- För det sjätte, om A = C = 0, kommer ekvationen att ha formen Vy + D = 0, det vill säga den kommer att rapportera parallellitet till Oxz.
Ekvationsvy i radsegment
Om siffrorna A, B, C, D inte är noll kan ekvationsformen (0) vara följande:
x / a + y / b + z / c = 1,
där a = -D / A, b = -D / B, c = -D / C.
Som ett resultat får vi ekvationen för planet i segment. Det bör noteras att detta plan skär skäraxeln vid en punkt med koordinater (a, 0,0), Oy - (0, b, 0) och Oz - (0,0, c).

Med hänsyn till ekvationen x / a + y / b + z / c = 1 är det lätt att visuellt representera planet för planet i förhållande till ett givet koordinatsystem.
Normala vektorkoordinater
Den normala vektorn n till planet P har koordinater som är koefficienterna för den allmänna ekvationen för detta plan, det vill säga n (A, B, C).

För att bestämma koordinaterna för det normala n är det tillräckligt att känna till den givna planets allmänna ekvation.
När du använder en linjesegmentekvation somhar formen x / a + y / b + z / c = 1, som när du använder den allmänna ekvationen kan du skriva ner koordinaterna för alla normala vektorer för ett givet plan: (1 / a + 1 / b + 1 / c).
Det är värt att notera att den normala vektorn hjälperlösa olika problem. De vanligaste problemen inkluderar problemet med att bevisa planens vinkelrätthet eller parallellitet, problemet med att hitta vinklarna mellan planen eller vinklarna mellan plan och linjer.
Planekvationens form enligt punktens koordinater och den normala vektorn
En icke -noll vektor n vinkelrätt mot ett givet plan kallas normal (normal) för ett givet plan.
Antag att i koordinatutrymme (rektangulärt koordinatsystem) ges Oxyz:
- punkt Мₒ med koordinater (xₒ, yₒ, zₒ);
- nollvektor n = A * i + B * j + C * k.

Det är nödvändigt att upprätta en ekvation för ett plan som passerar genom punkten Mₒ vinkelrätt mot det normala n.
I rymden, välj valfri godtycklig punkt ochvi betecknar det med M (xy, z). Låt radievektorn för valfri punkt M (x, y, z) vara r = x * i + y * j + z * k, och radievektorn för punkten Mₒ (xₒ, yₒ, zₒ) - rₒ = xₒ * i + yₒ * j + zₒ * k. Punkten M kommer att tillhöra det givna planet om vektorn МₒМ är vinkelrät mot vektorn n. Låt oss skriva ortogonalitetstillståndet med hjälp av punktprodukten:
[MM, n] = 0.
Eftersom МₒМ = r - rₒ kommer vektorekvationen för planet att se ut så här:
[r - rₒ, n] = 0.
Denna ekvation kan ha en annan form.För detta används prickproduktens egenskaper och ekvatorns vänstra sida transformeras. [r - rₒ, n] = [r, n] - [rₒ, n]. Om [rₒ, n] betecknas som c, får vi följande ekvation: [r, n] - c = 0 eller [r, n] = c, vilket uttrycker projektionens konstantitet på den normala vektorn av radievektorer för givna poäng som tillhör planet.
Nu kan du få koordinatformen för att skriva vektorekvationen för vårt plan [r - rₒ, n] = 0. Eftersom r - rₒ = (x - xₒ) * i + (y - yₒ) * j + (z - zₒ ) * k, och n = A * i + B * j + C * k, vi har:

Det visar sig att vi har en ekvation av ett plan som passerar genom en punkt vinkelrätt mot det normala n:
A * (x- xₒ) + B * (y– yₒ) C * (z- zₒ) = 0.
Formen för ekvationen för planet enligt koordinaterna för två punkter och en vektorkollinjär till planet
Låt oss ställa in två godtyckliga punkter M ′ (x ′, y ′, z ′) och M ″ (x ″, y ″, z ″), samt en vektor a (a ′, a ″, a).
Nu kommer vi att kunna rita upp en ekvation för ett givet plan, som kommer att passera genom de befintliga punkterna M ′ och M ″, liksom vilken punkt M som helst med koordinater (x, y, z) parallellt med en given vektor a.
Dessutom måste vektorerna M′M = {x -x ′; y -y ′; zz ′} och M ″ M = {x ″ -x ′; y ″ -y ′; z ″ -z ′} vara planala med vektorn a = (a ′, a ″, a ‴), vilket betyder att (M′M, M ″ M, a) = 0.
Så vår ekvation för ett plan i rymden kommer att se ut så här:

Vy över ekvationen för ett plan som skär tre punkter
Låt oss säga att vi har tre punkter:(x ′, y ′, z ′), (x ″, y ″, z ″), (x ‴, y ‴, z ‴) som inte tillhör en rak linje. Det är nödvändigt att skriva ekvationen för planet som passerar genom de tre givna punkterna. Teorin om geometri hävdar att denna typ av plan verkligen existerar, men det är det enda och oändligt. Eftersom detta plan skär punkten (x ′, y ′, z ′) kommer formen för dess ekvation att vara följande:

Här är A, B, C noll samtidigt. Det givna planet skär också ytterligare två punkter: (x ″, y ″, z ″) och (x ‴, y ‴, z ‴). I detta avseende måste följande villkor vara uppfyllda:
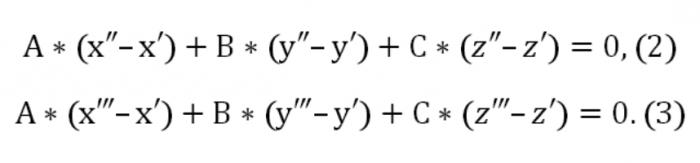
Nu kan vi komponera ett homogent ekvationssystem (linjärt) med okända u, v, w:
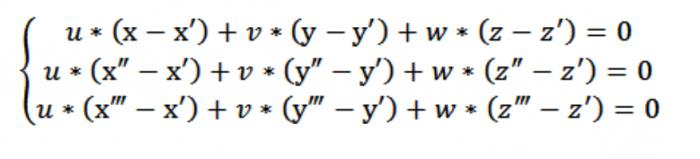
I vårt fall är x, y eller z godtyckligtpunkt som uppfyller ekvation (1). Med tanke på ekvation (1) och ekvationssystemet (2) och (3) uppfylls det ekvationssystem som anges i figuren ovan av vektorn N (A, B, C), som är icke -trivial. Det är därför determinanten för detta system är lika med noll.

Ekvation (1), som vi fick, ärär ekvationen för planet. Det går igenom 3 poäng exakt, och det är lätt att kontrollera. För att göra detta måste vi expandera vår determinant med elementen i den första raden. Det följer av de befintliga egenskaperna hos determinanten att vårt plan samtidigt skär tre initialt angivna punkter (x ′, y ′, z ′), (x ″, y ″, z ″), (x ‴, y ‴, z ‴) . Det vill säga att vi har löst den uppgift som vi har framför oss.
Dihedral vinkel mellan plan
Dihedralvinkeln ären rumslig geometrisk figur som bildas av två halvplan som utgår från en rak linje. Med andra ord är detta en del av rymden som begränsas av dessa halvplan.
Låt oss säga att vi har två plan med följande ekvationer:

Vi vet att vektorerna N = (A, B, C) ochN¹ = (А¹, В¹, С¹) är vinkelräta enligt de angivna planen. I detta avseende är vinkeln φ mellan vektorerna N och N¹ lika med vinkeln (dihedral), som är mellan dessa plan. Punktprodukten är:
NN¹ = | N || N¹ | cos φ,
just därför
cosφ = NN¹ / | N || N¹ | = (AA¹ + BB¹ + CC¹) / ((√ (A² + B² + C²)) * (√ (A¹) ² + (B¹) ² + (C¹) ²)).

Det räcker med att ta hänsyn till att 0≤φ≤π.
Faktum är att två plan som skär varandra bildar två vinklar (dihedral): φ1 och φ2... Deras summa är lika med π (φ1+ φ2= π). När det gäller deras cosinus är deras absoluta värden lika, men de skiljer sig åt i tecken, det vill säga cos φ1= -cos φ2... Om vi i ekvation (0) ersätter A, B och C med siffrorna -A, -B respektive -C, så bestämmer ekvationen som vi får samma plan, den enda vinkeln φ i ekvationen cos φ = NN1/ | N || N1| kommer att ersättas av π-φ.
Vinkelrätt planekvation
Planen kallas vinkelrätt, mellanvilken vinkel är 90 grader. Med hjälp av materialet som beskrivs ovan kan vi hitta ekvationen för ett plan vinkelrätt mot ett annat. Antag att vi har två plan: Ax + By + Cz + D = 0 och A¹x + B¹y + C¹z + D = 0. Vi kan hävda att de kommer att vara vinkelräta om cosφ = 0. Detta betyder att NN¹ = AA¹ + BB¹ + CC¹ = 0.
Parallellplanekvation
Parallellt är två plan som inte innehåller gemensamma punkter.
Villkoret för planernas parallellitet (deras ekvationersamma som i föregående avsnitt) är att vektorerna N och N¹, som är vinkelräta mot dem, är kollinära. Detta innebär att följande proportionalitetsvillkor är uppfyllda:
A / A¹ = B / B¹ = C / C¹.
Om proportionalitetsvillkoren förlängs - A / A¹ = B / B¹ = C / C¹ = DD¹,
detta indikerar att dessa plan sammanfaller. Det betyder att ekvationerna Ax + By + Cz + D = 0 och A¹x + B¹y + C¹z + D¹ = 0 beskriver ett plan.
Avstånd till planet från punkt
Antag att vi har ett plan P, som angesekvation (0). Det är nödvändigt att hitta avståndet till punkten med koordinaterna (xₒ, yₒ, zₒ) = Qₒ. För att göra detta måste du ta ekvationen för planet P till en normal form:
(p, v) = p (p≥0).
I det här fallet är ρ (x, y, z)radievektorn för vår punkt Q, belägen på P, p är längden på det vinkelräta P, som släpptes från nollpunkten, v är enhetsvektorn, som är belägen i riktningen a.
Skillnaden ρ-ρº för radievektorn för någon punkt Q = (x, y, z), som tillhör P, liksom radievektorn för en given punkt Q0= (xₒ, yₒ, zₒ) är en sådan vektor, vars absoluta värde för projektionen på v är lika med avståndet d, som måste hittas från Q0= (xₒ, yₒ, zₒ) till P:
D = | (ρ-ρ0, v) |, men
(ρ-ρ0, v) = (ρ, v) - (ρ0, v) = р– (ρ0, v).
Så det visar sig
d = | (ρ0, v) -p |.
Nu sett att beräkna avståndet d från Q0 till planet P måste du använda den normala formen av ekvationen för planet, medan du överför till vänster sida av p, och ersätter (xₒ, yₒ, zₒ) i den sista istället för x, y, z.
Således kommer vi att hitta det absoluta värdet av det resulterande uttrycket, det vill säga det önskade d.
Med parameterspråket får vi det uppenbara:
d = | Axₒ + Byₒ + Czₒ | / √ (A² + B² + C²).
Om en given punkt Q0 är på andra sidan av planet P, som ursprunget, sedan mellan vektorn ρ-ρ0 och v är en stum vinkel, därför:
d = - (ρ -ρ0, v) = (ρ0, v) -p> 0.
I det fall då punkten Q0 tillsammans med koordinaternas ursprung ligger på samma sida av P, då är den skapade vinkeln spetsig, det vill säga:
d = (ρ-ρ0, v) = р - (ρ0, v)> 0.
Som ett resultat visar det sig att i det första fallet (ρ0, v)> р, i den andra (ρ0, v) <s.
Tangentplanet och dess ekvation
Tangentplanet till ytan vid tangenspunkten Mº är planet som innehåller alla möjliga tangenter till kurvorna som dras genom denna punkt på ytan.
Med denna form av ekvationen för ytan F (x, y, z) = 0 kommer ekvensen för tangentplanet vid tangentpunkten Mº (xº, yº, zº) att se ut så här:
Fx(xº, yº, zº) (x- xº) + Fx(xº, yº, zº) (y- yº) + Fx(xº, yº, zº) (z-zº) = 0.
Om vi sätter ytan i explicit form z = f (x, y), kommer tangentplanet att beskrivas med ekvationen:
z-zº = f (xº, yº) (x- xº) + f (xº, yº) (y-yº).
Korsning av två plan
Systemet är beläget i tredimensionellt utrymmekoordinater (rektangulära) Oxyz, två plan P ′ och P ″ ges, som skär varandra och inte sammanfaller. Eftersom varje plan i ett rektangulärt koordinatsystem bestäms av den allmänna ekvationen, antar vi att P ′ och P ″ ges av ekvationerna Ax + B′y + C′z + D ′ = 0 och A ″ x + B ″ y + C ″ z + D ″ = 0. I detta fall har vi det normala n '(A', B ', C') för planet P 'och det normala n ″ (A ″, B ″, C ″) på planet P ″. Eftersom våra plan inte är parallella och inte sammanfaller är dessa vektorer inte kollinära. Med hjälp av matematikens språk kan vi skriva detta villkor enligt följande: n ′ ≠ n ″ ↔ (A ′, B ′, C ′) ≠ (λ * A ″, λ * B ″, λ * C ″), λϵR. Låt den raka linjen som ligger i skärningspunkten mellan P ′ och P ″ betecknas med bokstaven a, i detta fall a = P ′ ∩ P ″.
a är en rak linje som består av en uppsättning av alla punkter(vanliga) plan P ′ och P ″. Detta innebär att koordinaterna för varje punkt som hör till den raka linjen a samtidigt måste uppfylla ekvationerna A'x + B'y + C'z + D '= 0 och A ″ x + B ″ y + C ″ z + D ″ = 0. Detta innebär att koordinaterna för punkten kommer att vara en särskild lösning för följande ekvationssystem:

Som ett resultat visar det sig att lösningen (allmän) av dettaekvationssystemet kommer att bestämma koordinaterna för var och en av punkterna på den raka linjen, som kommer att fungera som skärningspunkten för P ′ och P ″, och bestämma den raka linjen a i Oxyz -koordinatsystemet (rektangulärt) i rymden.