No espaço, o plano pode ser definido por diferentescaminhos (um ponto e um vetor, dois pontos e um vetor, três pontos, etc.). É com isso em mente que a equação do plano pode ter várias formas. Além disso, se certas condições forem atendidas, os planos podem ser paralelos, perpendiculares, se cruzando, etc. Falaremos sobre isso neste artigo. Aprenderemos como desenhar a equação geral do plano e muito mais.
Forma normal da equação
Suponha que haja um espaço R3, que tem um sistema de coordenadas XYZ retangular. Vamos definir um vetor α, que será liberado do ponto inicial O. No final do vetor α, desenhe um plano P, que será perpendicular a ele.
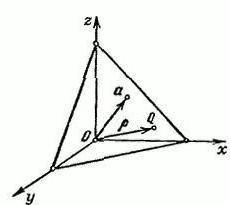
Denotamos em П um ponto arbitrário Q = (x, y, z). Vamos assinar o vetor de raio do ponto Q com a letra p. Nesse caso, o comprimento do vetor α é igual ap = IαI e Ʋ = (cosα, cosβ, cosγ).
Este é um vetor unitário que é direcionado paralado, bem como o vetor α. α, β e γ são os ângulos formados entre o vetor Ʋ e as direções positivas dos eixos espaciais x, y, z, respectivamente. A projeção de qualquer ponto Qϵϵ no vetor Ʋ é um valor constante, que é igual ap: (p, Ʋ) = p (p≥0).
A equação acima faz sentido quando p = 0.A única coisa é que o plano P neste caso irá interceptar o ponto O (α = 0), que é a origem, e o vetor unitário Ʋ emitido do ponto O será perpendicular a P, apesar de sua direção, o que significa que o vetor Ʋ é determinado com precisão ao sinal. A equação anterior é a equação do nosso plano P, expressa em forma de vetor. Mas em coordenadas, sua aparência será assim:

P aqui é maior ou igual a 0. Encontramos a equação do plano no espaço na forma normal.
Equação Geral
Se multiplicarmos a equação em coordenadas por qualquer número que não seja zero, obtemos uma equação equivalente à dada, que define o mesmo plano. Isso parecerá assim:

Aqui, A, B, C são números diferentes de zero ao mesmo tempo. Esta equação é conhecida como equação do plano geral.
Equações de planos. Casos especiais
A equação geral pode ser modificada na presença de condições adicionais. Vamos dar uma olhada em alguns deles.
Suponhamos que o coeficiente A seja igual a 0. Isso significa que esse plano é paralelo ao eixo Ox dado. Nesse caso, a forma da equação mudará: Vy + Cz + D = 0.
Da mesma forma, a forma da equação mudará nas seguintes condições:
- Primeiro, se B = 0, então a equação mudará para Ax + Cz + D = 0, o que indicará que ela é paralela ao eixo Oy.
- Em segundo lugar, se C = 0, então a equação é transformada em Ax + Vy + D = 0, o que falará de paralelismo ao eixo dado Oz.
- Terceiro, se D = 0, a equação será semelhante a Ax + Vy + Cz = 0, o que significa que o plano intercepta O (origem).
- Quarto, se A = B = 0, então a equação mudará para Cz + D = 0, o que será paralelo a Oxy.
- Quinto, se B = C = 0, então a equação se torna Ax + D = 0, o que significa que o plano para Oyz é paralelo.
- Sexto, se A = C = 0, então a equação assumirá a forma Vy + D = 0, ou seja, reportará paralelismo a Oxz.
Visualização de equação em segmentos de linha
No caso em que os números A, B, C, D são diferentes de zero, a forma da equação (0) pode ser a seguinte:
x / a + y / b + z / c = 1,
em que a = -D / A, b = -D / B, c = -D / C.
Como resultado, obtemos a equação do plano em segmentos. É importante notar que este plano irá interceptar o eixo do Boi em um ponto com as coordenadas (a, 0,0), Oy - (0, b, 0) e Oz - (0,0, c).

Levando em consideração a equação x / a + y / b + z / c = 1, é fácil representar visualmente a localização do plano em relação a um determinado sistema de coordenadas.
Coordenadas vetoriais normais
O vetor normal n ao plano P possui coordenadas que são os coeficientes da equação geral deste plano, ou seja, n (A, B, C).

Para determinar as coordenadas do n normal, basta conhecer a equação geral do plano dado.
Ao usar uma equação de segmento de linha quetem a forma x / a + y / b + z / c = 1, pois ao usar a equação geral, você pode escrever as coordenadas de qualquer vetor normal de um determinado plano: (1 / a + 1 / b + 1 / c).
É importante notar que o vetor normal ajudaresolver vários problemas. Os problemas mais comuns incluem o problema de provar a perpendicularidade ou paralelismo dos planos, o problema de encontrar os ângulos entre os planos ou os ângulos entre os planos e as linhas.
A forma da equação do plano de acordo com as coordenadas do ponto e o vetor normal
Um vetor diferente de zero n perpendicular a um determinado plano é chamado de normal (normal) para um determinado plano.
Suponha que no espaço de coordenadas (sistema de coordenadas retangulares) Oxyz sejam dados:
- ponto Мₒ com coordenadas (xₒ, yₒ, zₒ);
- vetor zero n = A * i + B * j + C * k.

É necessário traçar uma equação para um plano que passará pelo ponto Mₒ perpendicular à normal n.
No espaço, escolha qualquer ponto arbitrário enós o denotamos por M (xy, z). Seja o vetor do raio de qualquer ponto M (x, y, z) r = x * i + y * j + z * k, e o vetor do raio do ponto Mₒ (xₒ, yₒ, zₒ) - rₒ = xₒ * i + yₒ * j + zₒ * k. O ponto M pertencerá ao plano dado se o vetor МₒМ for perpendicular ao vetor n. Vamos escrever a condição de ortogonalidade usando o produto escalar:
[MM, n] = 0.
Como МₒМ = r - rₒ, a equação vetorial do plano será semelhante a esta:
[r - rₒ, n] = 0.
Essa equação pode ter outra forma.Para isso, as propriedades do produto escalar são usadas e o lado esquerdo da equação é transformado. [r - rₒ, n] = [r, n] - [rₒ, n]. Se [rₒ, n] é denotado como c, então temos a seguinte equação: [r, n] - c = 0 ou [r, n] = c, que expressa a constância das projeções no vetor normal de vetores de raio de dados pontos que pertencem ao plano.
Agora você pode obter a forma coordenada de escrever a equação vetorial de nosso plano [r - rₒ, n] = 0. Já que r - rₒ = (x - xₒ) * i + (y - yₒ) * j + (z - zₒ ) * k e n = A * i + B * j + C * k, temos:

Acontece que temos uma equação de um plano passando por um ponto perpendicular ao n normal:
A * (x- xₒ) + B * (y– yₒ) C * (z - zₒ) = 0.
A forma da equação do plano de acordo com as coordenadas de dois pontos e um vetor colinear ao plano
Vamos definir dois pontos arbitrários M ′ (x ′, y ′, z ′) e M ″ (x ″, y ″, z ″), bem como um vetor a (a ′, a ″, a).
Agora poderemos traçar uma equação de um dado plano, que passará pelos pontos existentes M ′ e M ″, bem como qualquer ponto M com coordenadas (x, y, z) paralelas a um dado vetor a.
Além disso, os vetores M′M = {x-x ′; y-y ′; zz ′} e M ″ M = {x ″ -x ′; y ″ -y ′; z ″ -z ′} devem ser coplanares com o vetor a = (a ′, a ″, a ‴), o que significa que (M′M, M ″ M, a) = 0.
Então, nossa equação de um plano no espaço será parecida com esta:

Vista da equação de um plano que cruza três pontos
Digamos que temos três pontos:(x ′, y ′, z ′), (x ″, y ″, z ″), (x ‴, y ‴, z ‴) que não pertencem a uma linha reta. É necessário escrever a equação do plano que passa pelos três pontos dados. A teoria da geometria afirma que esse tipo de plano realmente existe, mas é o único e inimitável. Uma vez que este plano intercepta o ponto (x ′, y ′, z ′), a forma de sua equação será a seguinte:

Aqui, A, B, C são diferentes de zero ao mesmo tempo. Além disso, o plano dado cruza mais dois pontos: (x ″, y ″, z ″) e (x ‴, y ‴, z ‴). A este respeito, as seguintes condições devem ser atendidas:
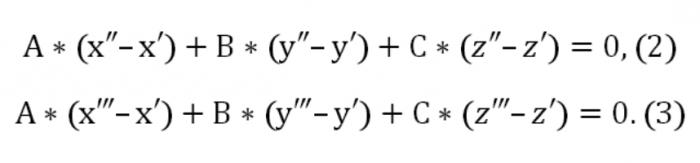
Agora podemos compor um sistema homogêneo de equações (lineares) com incógnitas u, v, w:
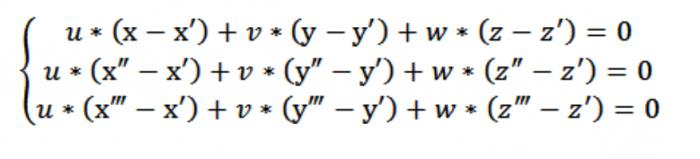
No nosso caso, x, y ou z é arbitrárioponto que satisfaz a equação (1). Considerando a equação (1) e o sistema de equações (2) e (3), o sistema de equações indicado na figura acima é satisfeito pelo vetor N (A, B, C), que não é trivial. É por isso que o determinante desse sistema é igual a zero.

A equação (1), que obtivemos, éé a equação do plano. Ele passa exatamente por 3 pontos e é fácil de verificar. Para fazer isso, precisamos expandir nosso determinante pelos elementos localizados na primeira linha. Conclui-se das propriedades existentes do determinante que nosso plano cruza simultaneamente três pontos inicialmente especificados (x ′, y ′, z ′), (x ″, y ″, z ″), (x ‴, y ‴, z ‴) . Ou seja, resolvemos a tarefa que nos foi proposta.
Ângulo diédrico entre planos
O ângulo diedro éuma figura geométrica espacial formada por dois semiplanos que emanam de uma linha reta. Em outras palavras, esta é uma parte do espaço que é limitada por esses semiplanos.
Digamos que temos dois planos com as seguintes equações:

Sabemos que os vetores N = (A, B, C) eN¹ = (A¹, B¹, C¹) são perpendiculares de acordo com os planos dados. Nesse sentido, o ângulo φ entre os vetores N e N¹ é igual ao ângulo (diedro), que está entre esses planos. O produto escalar é:
NN¹ = | N || N¹ | cos φ,
precisamente porque
cosφ = NN¹ / | N || N¹ | = (AA¹ + BB¹ + CC¹) / ((√ (A² + B² + C²)) * (√ (A¹) ² + (B¹) ² + (C¹) ²)).

Basta levar em conta que 0≤φ≤π.
Na verdade, dois planos que se cruzam formam dois ângulos (diedro): φ1 e φ2... Sua soma é igual a π (φ1+ φ2= π). Quanto aos cossenos, seus valores absolutos são iguais, mas diferem em sinais, ou seja, cos φ1= -cos φ2... Se na equação (0) substituirmos A, B e C pelos números -A, -B e -C, respectivamente, a equação que obtermos determinará o mesmo plano, o único ângulo φ na equação cos φ = NN1/ | N || N1| será substituído por π-φ.
Equação do plano perpendicular
Os planos são chamados perpendiculares, entrecujo ângulo é de 90 graus. Usando o material delineado acima, podemos encontrar a equação de um plano perpendicular a outro. Suponha que temos dois planos: Ax + By + Cz + D = 0 e A¹x + B¹y + C¹z + D = 0. Podemos afirmar que eles serão perpendiculares se cosφ = 0. Isso significa que NN¹ = AA¹ + BB¹ + CC¹ = 0.
Equação do plano paralelo
Paralelos são dois planos que não contêm pontos comuns.
A condição para o paralelismo dos planos (suas equaçõeso mesmo que na seção anterior) é que os vetores N e N¹, que são perpendiculares a eles, são colineares. Isso significa que as seguintes condições de proporcionalidade são atendidas:
A / A¹ = B / B¹ = C / C¹.
Se as condições de proporcionalidade forem estendidas - A / A¹ = B / B¹ = C / C¹ = DD¹,
isso indica que esses planos coincidem. E isso significa que as equações Ax + By + Cz + D = 0 e A¹x + B¹y + C¹z + D¹ = 0 descrevem um plano.
Distância ao plano do ponto
Suponha que temos um plano P, que é dadoequação (0). É necessário encontrar a distância a ele do ponto com as coordenadas (xₒ, yₒ, zₒ) = Qₒ. Para fazer isso, você precisa trazer a equação do plano P em uma forma normal:
(p, v) = p (p≥0).
Neste caso, ρ (x, y, z) évetor raio de nosso ponto Q, localizado em P, p é o comprimento da perpendicular P, que foi liberada do ponto zero, v é o vetor unitário, que está localizado na direção a.
A diferença ρ-ρº do vetor raio de algum ponto Q = (x, y, z), pertencente a P, bem como o vetor raio de um determinado ponto Q0= (xₒ, yₒ, zₒ) é esse vetor, o valor absoluto da projeção da qual em v é igual à distância d, que deve ser encontrada a partir de Q0= (xₒ, yₒ, zₒ) a P:
D = | (ρ-ρ0, v) |, mas
(ρ-ρ0, v) = (ρ, v) - (ρ0, v) = р– (ρ0, v).
Então acontece
d = | (ρ0, v) -p |.
Agora visto para calcular a distância d de Q0 para o plano P, você precisa usar a forma normal da equação do plano, enquanto transfere para o lado esquerdo de p, e substitui (xₒ, yₒ, zₒ) no último em vez de x, y, z.
Assim, encontraremos o valor absoluto da expressão resultante, ou seja, o d desejado.
Usando a linguagem de parâmetros, obtemos o óbvio:
d = | Axₒ + Byₒ + Czₒ | / √ (A² + B² + C²).
Se um determinado ponto Q0 está do outro lado do plano P, como a origem, então entre o vetor ρ-ρ0 ev é um ângulo obtuso, portanto:
d = - (ρ-ρ0, v) = (ρ0, v) -p> 0.
No caso em que o ponto Q0 junto com a origem das coordenadas está localizada no mesmo lado de P, então o ângulo criado é agudo, ou seja:
d = (ρ-ρ0, v) = р - (ρ0, v)> 0.
Como resultado, verifica-se que no primeiro caso (ρ0, v)> р, no segundo (ρ0, v) <p.
O plano tangente e sua equação
O plano tangente à superfície no ponto de tangência Mº é o plano que contém todas as tangentes possíveis às curvas traçadas por este ponto na superfície.
Com esta forma da equação da superfície F (x, y, z) = 0, a equação do plano tangente no ponto tangente Mº (xº, yº, zº) ficará assim:
Fx(xº, yº, zº) (x- xº) + Fx(xº, yº, zº) (y- yº) + Fx(xº, yº, zº) (z-zº) = 0.
Se definirmos a superfície na forma explícita z = f (x, y), o plano tangente será descrito pela equação:
z-zº = f (xº, yº) (x- xº) + f (xº, yº) (y-yº).
Intersecção de dois planos
O sistema está localizado no espaço tridimensionalcoordenadas (retangulares) Oxyz, dois planos P ′ e P ″ são dados, que se cruzam e não coincidem. Como qualquer plano em um sistema de coordenadas retangulares é determinado pela equação geral, assumiremos que P ′ e P ″ são dados pelas equações Ax + B′y + C′z + D ′ = 0 e A ″ x + B ″ y + C ″ z + D ″ = 0. Neste caso, temos o n ′ normal (A ′, B ′, C ′) do plano P ′ e o n ″ normal (A ″, B ″, C ″) do plano P ″. Como nossos planos não são paralelos e não coincidem, esses vetores não são colineares. Usando a linguagem da matemática, podemos escrever esta condição da seguinte forma: n ′ ≠ n ″ ↔ (A ′, B ′, C ′) ≠ (λ * A ″, λ * B ″, λ * C ″), λϵR. Seja a reta que se encontra na intersecção de P ′ e P ″ pela letra a, neste caso a = P ′ ∩ P ″.
a é uma linha reta que consiste em um conjunto de todos os pontosplanos (comuns) P ′ e P ″. Isso significa que as coordenadas de qualquer ponto pertencente à linha reta a devem satisfazer simultaneamente as equações A'x + B'y + C'z + D '= 0 e A ″ x + B ″ y + C ″ z + D ″ = 0. Isso significa que as coordenadas do ponto serão uma solução particular do seguinte sistema de equações:

Como resultado, verifica-se que a solução (geral) desteo sistema de equações determinará as coordenadas de cada um dos pontos da reta, que atuará como ponto de interseção de P ′ e P ″, e determinará a reta a no sistema de coordenadas de Oxyz (retangular) no espaço.