V prostoru může být letadlo nastaveno různýmizpůsoby (jeden bod a vektor, dva body a vektor, tři body atd.). S ohledem na to může mít rovnice roviny různé podoby. Rovněž, pokud jsou splněny určité podmínky, mohou být roviny rovnoběžné, kolmé, protínající se atd. O tom si povíme v tomto článku. Naučíme se sestavit obecnou rovnici roviny a další.
Normální tvar rovnice
Předpokládejme, že existuje prostor R.3, který má obdélníkový souřadnicový systém XYZ. Definujme vektor α, který bude uvolněn z počátečního bodu O. Koncem vektoru α nakreslíme rovinu P, která na něj bude kolmá.
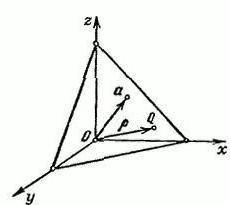
Označujeme na libovolném bodě Q = (x, y, z). Podepíšeme vektor poloměru bodu Q písmenem p. V tomto případě je délka vektoru α rovná p = IαI a Ʋ = (cosα, cosβ, cosγ).
Toto je jednotkový vektor, na který je směrovánostrana, stejně jako vektor α. α, β a γ jsou úhly, které jsou vytvořeny mezi vektorem Ʋ a kladnými směry prostorových os x, y, z. Projekce libovolného bodu QϵП na vektor Ʋ je konstantní hodnota, která se rovná p: (p, Ʋ) = p (p≥0).
Výše uvedená rovnice má smysl, když p = 0.Jediná věc je, že rovina P v tomto případě protne bod O (α = 0), což je počátek, a jednotkový vektor Ʋ emitovaný z bodu O bude i přes svůj směr kolmý na P, což znamená, že vektor Ʋ je určen s přesností na znaménko. Předchozí rovnice je rovnicí naší roviny P vyjádřené ve vektorové formě. Ale v souřadnicích bude jeho vzhled vypadat takto:

P zde je větší nebo rovno 0. Našli jsme rovnici roviny v prostoru v normální formě.
Obecná rovnice
Pokud je rovnice v souřadnicích vynásobena libovolným číslem, které není nula, dostaneme rovnici ekvivalentní dané, která definuje stejnou rovinu. Bude to vypadat takto:

Zde A, B, C jsou čísla, která jsou nenulová současně. Tato rovnice se označuje jako obecná rovnice roviny.
Rovnice rovin. Speciální případy
Obecnou rovnici lze upravit za přítomnosti dalších podmínek. Pojďme se podívat na některé z nich.
Předpokládejme, že koeficient A je roven 0. To znamená, že tato rovina je rovnoběžná s danou osou Ox. V tomto případě se změní tvar rovnice: Vy + Cz + D = 0.
Podobně se forma rovnice změní za následujících podmínek:
- Za prvé, pokud B = 0, pak se rovnice změní na Ax + Cz + D = 0, což bude znamenat, že je rovnoběžná s osou Oy.
- Za druhé, pokud C = 0, pak je rovnice transformována na Ax + Vy + D = 0, což bude hovořit o rovnoběžnosti s danou osou Oz.
- Za třetí, pokud D = 0, bude rovnice vypadat jako Ax + Vy + Cz = 0, což znamená, že rovina protíná O (počátek).
- Začtvrté, pokud A = B = 0, pak se rovnice změní na Cz + D = 0, což se ukáže jako rovnoběžné s Oxy.
- Za páté, pokud B = C = 0, pak se rovnice stane Ax + D = 0, což znamená, že rovina k Oyz je rovnoběžná.
- Za šesté, pokud A = C = 0, pak bude mít rovnice tvar Vy + D = 0, to znamená, že bude hlásit rovnoběžnost s Oxz.
Zobrazení rovnic v úsečkách
V případě, že čísla A, B, C, D jsou nenulová, může rovnice (0) vypadat následovně:
x / a + y / b + z / c = 1,
ve kterém a = -D / A, b = -D / B, c = -D / C.
V důsledku toho dostaneme rovnici roviny v segmentech. Je třeba poznamenat, že tato rovina protíná osu Ox v bodě se souřadnicemi (a, 0,0), Oy - (0, b, 0) a Oz - (0,0, c).

S přihlédnutím k rovnici x / a + y / b + z / c = 1 je snadné vizuálně znázornit polohu roviny vzhledem k danému souřadnému systému.
Normální vektorové souřadnice
Normální vektor n k rovině P má souřadnice, které jsou koeficienty obecné rovnice této roviny, tj. N (A, B, C).

K určení souřadnic normály n stačí znát obecnou rovnici dané roviny.
Při použití rovnice segmentu čáry, žemá tvar x / a + y / b + z / c = 1, protože při použití obecné rovnice si můžete zapsat souřadnice libovolného normálního vektoru dané roviny: (1 / a + 1 / b + 1 / C).
Stojí za zmínku, že normální vektor pomáhářešit různé problémy. Mezi nejčastější problémy patří problém prokazování kolmosti nebo rovnoběžnosti rovin, problém hledání úhlů mezi rovinami nebo úhlů mezi rovinami a přímkami.
Forma rovinné rovnice podle souřadnic bodu a normálového vektoru
Nenulový vektor n kolmý na danou rovinu se pro danou rovinu nazývá normální (normální).
Předpokládejme, že v souřadnicovém prostoru (pravoúhlý souřadnicový systém) jsou uvedeny Oxyz:
- bod Мₒ se souřadnicemi (xₒ, yₒ, zₒ);
- nulový vektor n = A * i + B * j + C * k.

Je nutné vypracovat rovnici pro rovinu, která projde bodem Mₒ kolmým na normálu n.
V prostoru vyberte libovolný libovolný bod aoznačíme M (xy, z). Nechť je vektor poloměru libovolného bodu M (x, y, z) r = x * i + y * j + z * k a vektor poloměru bodu Mₒ (xₒ, yₒ, zₒ) - rₒ = xₒ * i + yₒ * j + zₒ * k. Bod M bude patřit k dané rovině, pokud je vektor МₒМ kolmý na vektor n. Napíšeme podmínku ortogonality pomocí bodového součinu:
[MM, n] = 0.
Protože МₒМ = r - rₒ, bude vektorová rovnice roviny vypadat takto:
[r - rₒ, n] = 0.
Tato rovnice může mít i jinou podobu.K tomu se používají vlastnosti bodového součinu a transformuje se levá strana rovnice. [r - rₒ, n] = [r, n] - [rₒ, n]. Je -li [rₒ, n] označeno jako c, pak dostaneme následující rovnici: [r, n] - c = 0 nebo [r, n] = c, která vyjadřuje stálost projekcí na normální vektor poloměrných vektorů dané body, které patří k rovině.
Nyní můžete získat souřadnicovou formu zápisu vektorové rovnice naší roviny [r - rₒ, n] = 0. Protože r - rₒ = (x - xₒ) * i + (y - yₒ) * j + (z - zₒ ) * k, a n = A * i + B * j + C * k, máme:

Ukazuje se, že máme rovnici roviny procházející bodem kolmým na normálu n:
A * (x- xₒ) + B * (y– yₒ) C * (z- zₒ) = 0.
Forma rovnice roviny podle souřadnic dvou bodů a vektoru kolineárního k rovině
Nastavme dva libovolné body M '(x', y ', z') a M '' (x '', y ', z'), jakož i vektor a (a ', a', a).
Nyní budeme moci sestavit rovnici dané roviny, která projde stávajícími body M ′ a M ″, jakož i libovolným bodem M se souřadnicemi (x, y, z) rovnoběžnými s daným vektorem a.
Vektory M′M = {x -x ′; y -y ′; zz ′} a M ″ M = {x ″ -x ′; y ″ -y ′; z ″ -z ′} navíc musí být koplanární s vektorem a = (a ', a', a ‴), což znamená, že (M'M, M '' M, a) = 0.
Naše rovnice roviny v prostoru tedy bude vypadat takto:

Pohled na rovnici roviny protínající tři body
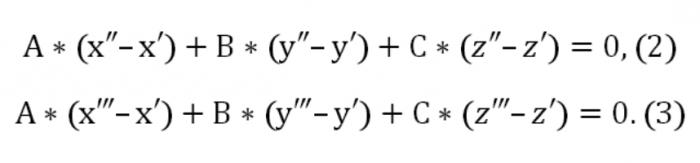
Řekněme, že máme tři body:(x ′, y ′, z ′), (x ″, y ″, z ″), (x ‴, y ‴, z ‴), které nepatří k jedné přímce. Je nutné napsat rovnici roviny procházející danými třemi body. Teorie geometrie tvrdí, že tento druh roviny skutečně existuje, ale je jediný a nenapodobitelný. Protože tato rovina protíná bod (x ', y', z '), bude tvar její rovnice následující:

Zde A, B, C jsou nenulové současně. Daná rovina také protíná další dva body: (x ″, y ″, z ″) a (x ‴, y ‴, z ‴). V tomto ohledu musí být splněny následující podmínky:
Nyní můžeme sestavit homogenní systém rovnic (lineárních) s neznámými u, v, w:
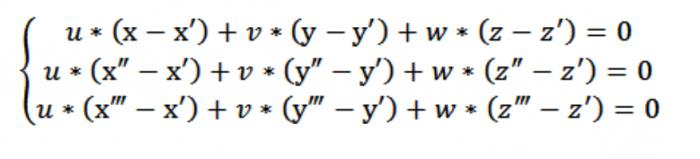
V našem případě je x, y nebo z libovolnébod, který splňuje rovnici (1). S ohledem na rovnici (1) a soustavu rovnic (2) a (3) je soustava rovnic naznačená na obrázku výše splněna vektorem N (A, B, C), který je netriviální. Proto je determinant tohoto systému roven nule.

Rovnice (1), kterou jsme dostali, jeje rovnice roviny. Přesně prochází 3 body a snadno se kontroluje. K tomu musíme rozšířit náš determinant o prvky umístěné v prvním řádku. Ze stávajících vlastností determinantu vyplývá, že naše rovina současně protíná tři původně určené body (x ′, y ′, z ′), (x ″, y ″, z ″), (x ‴, y ‴, z ‴) . To znamená, že jsme vyřešili úkol, který jsme měli před sebou.
Vzepětí mezi rovinami
Dhedrální úhel jeprostorová geometrická postava tvořená dvěma polorovinami, které vycházejí z jedné přímky. Jinými slovy, toto je část prostoru, který je omezen těmito polorovinami.
Řekněme, že máme dvě roviny s následujícími rovnicemi:

Víme, že vektory N = (A, B, C) aN¹ = (А¹, В¹, С¹) jsou kolmé podle daných rovin. V tomto ohledu je úhel φ mezi vektory N a N¹ roven úhlu (dihedrálnímu), který je mezi těmito rovinami. Tečkový produkt je:
NN¹ = | N || N¹ | cos φ,
právě proto
cosφ = NN¹ / | N || N¹ | = (AA¹ + BB¹ + CC¹) / ((√ (A² + B² + C²)) * (√ (A¹) ² + (B¹) ² + (C¹) ²)).

Stačí vzít v úvahu, že 0≤φ≤π.
Ve skutečnosti dvě roviny, které se protínají, vytvářejí dva úhly (vzepětí): φ1 a φ2... Jejich součet se rovná π (φ1+ φ2= π). Pokud jde o jejich kosiny, jejich absolutní hodnoty jsou stejné, ale liší se ve znacích, tj. Cos φ1= -cos φ2... Pokud v rovnici (0) nahradíme A, B a C čísly -A, -B a -C, pak rovnice, kterou dostaneme, určí stejnou rovinu, jediný úhel φ v rovnici cos φ = NN1/ | N || N1| bude nahrazeno π-φ.
Rovnice kolmé roviny
Roviny se nazývají kolmé, mezikterý úhel je 90 stupňů. Pomocí výše nastíněného materiálu můžeme najít rovnici roviny kolmé na jinou. Předpokládejme, že máme dvě roviny: Ax + By + Cz + D = 0 a A¹x + B¹y + C¹z + D = 0. Můžeme tvrdit, že budou kolmé, pokud cosφ = 0. To znamená, že NN¹ = AA¹ + BB¹ + CC¹ = 0.
Rovnice rovnoběžné roviny
Paralelní jsou dvě roviny, které neobsahují společné body.
Podmínka, aby byly roviny rovnoběžné (jejich rovnicestejné jako v předchozí části) je, že vektory N a N¹, které jsou na ně kolmé, jsou kolineární. To znamená, že jsou splněny následující podmínky proporcionality:
A / A¹ = B / B¹ = C / C¹.
Pokud jsou podmínky proporcionality rozšířeny - A / A¹ = B / B¹ = C / C¹ = DD¹,
to naznačuje, že se tyto roviny shodují. A to znamená, že rovnice Ax + By + Cz + D = 0 a A¹x + B¹y + C¹z + D¹ = 0 popisují jednu rovinu.
Vzdálenost letadla od bodu
Předpokládejme, že máme rovinu P, která je dánarovnice (0). Je nutné k němu najít vzdálenost od bodu se souřadnicemi (xₒ, yₒ, zₒ) = Qₒ. Chcete -li to provést, musíte uvést rovnici roviny P do normální podoby:
(p, v) = p (p≥0).
V tomto případě ρ (x, y, z) jepoloměrový vektor našeho bodu Q, umístěný na P, p je délka kolmice P, která byla uvolněna z nulového bodu, v je jednotkový vektor, který se nachází ve směru a.
Rozdíl ρ-ρº vektoru poloměru nějakého bodu Q = (x, y, z), patřícího P, stejně jako vektoru poloměru daného bodu Q0= (xₒ, yₒ, zₒ) je takový vektor, jehož absolutní hodnota projekce na v se rovná vzdálenosti d, kterou je třeba zjistit z Q0= (xₒ, yₒ, zₒ) do P:
D = | (ρ-ρ0, v) |, ale
(ρ-ρ0, v) = (ρ, v) - (ρ0, v) = р– (ρ0, v).
Takže to dopadá
d = | (ρ0, v) -p |.
Nyní je vidět vypočítat vzdálenost d od Q0 k rovině P, musíte použít normální formu rovnice roviny, při přenosu na levou stranu p a nahrazovat (xₒ, yₒ, zₒ) v poslední místo x, y, z.
Najdeme tedy absolutní hodnotu výsledného výrazu, tedy požadované d.
Pomocí jazyka parametrů získáme zřejmé:
d = | Axₒ + Byₒ + Czₒ | / √ (A² + B² + C²).
Pokud je daný bod Q0 je na druhé straně roviny P, stejně jako počátek, pak mezi vektorem ρ-ρ0 a v je tupý úhel, proto:
d = - (ρ -ρ0, v) = (ρ0, v) -p> 0.
V případě, že bod Q0 spolu s počátkem souřadnic se nachází na stejné straně P, pak je vytvořený úhel akutní, to znamená:
d = (ρ-ρ0, v) = р - (ρ0, v)> 0.
V důsledku toho se ukazuje, že v prvním případě (ρ0, v)> р, ve druhém (ρ0, v) <str.
Tečná rovina a její rovnice
Dotyková rovina k povrchu v bodě tečnosti Mº je rovina obsahující všechny možné tečny ke křivkám nakresleným tímto bodem na povrchu.
S touto formou rovnice povrchu F (x, y, z) = 0 bude rovnice tečné roviny v bodě dotyku Mº (xº, yº, zº) vypadat takto:
Fx(xº, yº, zº) (x- xº) + Fx(xº, yº, zº) (y- yº) + Fx(xº, yº, zº) (z-zº) = 0.
Nastavíme -li povrch v explicitní formě z = f (x, y), pak bude tečná rovina popsána rovnicí:
z-zº = f (xº, yº) (x- xº) + f (xº, yº) (y-yº).
Křižovatka dvou rovin
Systém je umístěn v trojrozměrném prostorusouřadnice (obdélníkové) Oxyz, jsou dány dvě roviny P ′ a P ″, které se protínají a neshodují. Protože jakákoli rovina v pravoúhlém souřadnicovém systému je určena obecnou rovnicí, budeme předpokládat, že P ′ a P ″ jsou dány rovnicemi Ax + B′y + C′z + D ′ = 0 a A ″ x + B ″ y + C ″ z + D ″ = 0. V tomto případě máme normální n '(A', B ', C') roviny P 'a normální n' (A ', B', C ') roviny P'. Protože naše roviny nejsou rovnoběžné a neshodují se, nejsou tyto vektory nelineární. Pomocí jazyka matematiky můžeme tuto podmínku napsat následovně: n ′ ≠ n ″ ↔ (A ′, B ′, C ′) ≠ (λ * A ″, λ * B ″, λ * C ″), λϵR. Přímka, která leží v průsečíku P ′ a P ″, bude označena písmenem a, v tomto případě a = P ′ ∩ P ″.
a je přímka skládající se ze sady všech bodů(společné) roviny P 'a P' '. To znamená, že souřadnice libovolného bodu, který patří přímce a, musí současně splňovat rovnice A'x + B'y + C'z + D '= 0 a A ″ x + B ″ y + C ″ z + D ″ = 0. To znamená, že souřadnice bodu budou konkrétním řešením následující soustavy rovnic:

V důsledku toho se ukazuje, že řešení (obecné) tohotosoustava rovnic určí souřadnice každého z bodů přímky, která bude fungovat jako průsečík bodů P ′ a P ″, a určí přímku a v souřadnicovém systému Oxyz (obdélníkovém) v prostoru.