En el espacio, el avión puede ser configurado por diferentesformas (un punto y un vector, dos puntos y un vector, tres puntos, etc.). Teniendo esto en cuenta, la ecuación del plano puede tener varias formas. Además, si se cumplen ciertas condiciones, los planos pueden ser paralelos, perpendiculares, intersectantes, etc. Hablaremos de esto en este artículo. Aprenderemos a elaborar la ecuación general del avión y más.
Forma normal de la ecuación
Supongamos que hay un espacio R3, que tiene un sistema de coordenadas XYZ rectangular. Establezcamos un vector α, que se liberará desde el punto inicial O. A través del extremo del vector α, dibuje un plano P, que será perpendicular a él.
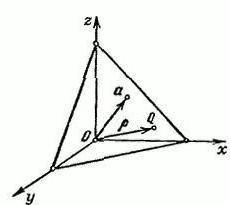
Denotamos en un punto arbitrario Q = (x, y, z). Firmemos el vector de radio del punto Q con la letra p. En este caso, la longitud del vector α es igual ap = IαI y Ʋ = (cosα, cosβ, cosγ).
Este es un vector unitario que se dirige alado, así como el vector α. α, β y γ son los ángulos que se forman entre el vector Ʋ y las direcciones positivas de los ejes espaciales x, y, z, respectivamente. La proyección de cualquier punto QϵП sobre el vector Ʋ es un valor constante, que es igual ap: (p, Ʋ) = p (p≥0).
La ecuación anterior tiene sentido cuando p = 0.Lo único es que el plano P en este caso cortará el punto O (α = 0), que es el origen, y el vector unitario Ʋ emitido desde el punto O será perpendicular a P, a pesar de su dirección, lo que significa que el vector Ʋ se determina con precisión al signo. La ecuación anterior es la ecuación de nuestro plano P, expresada en forma vectorial. Pero en coordenadas, su apariencia será así:

P aquí es mayor o igual que 0. Hemos encontrado la ecuación del plano en el espacio en la forma normal.
Ecuación general
Si multiplicamos la ecuación en coordenadas por cualquier número que no sea cero, obtenemos una ecuación que es equivalente a la dada, que define el mismo plano. Se verá así:

Aquí A, B, C son números distintos de cero al mismo tiempo. Esta ecuación se conoce como la ecuación general del avión.
Ecuaciones de planos. Casos especiales
La ecuación general se puede modificar en presencia de condiciones adicionales. Echemos un vistazo a algunos de ellos.
Suponga que el coeficiente A es igual a 0. Esto significa que este plano es paralelo al eje Ox dado. En este caso, la forma de la ecuación cambiará: Vu + Cz + D = 0.
De manera similar, la forma de la ecuación cambiará bajo las siguientes condiciones:
- Primero, si B = 0, entonces la ecuación cambiará a Ax + Cz + D = 0, lo que indicará que es paralela al eje Oy.
- En segundo lugar, si C = 0, entonces la ecuación se transforma en Ax + Vy + D = 0, lo que hablará de paralelismo con el eje Oz dado.
- En tercer lugar, si D = 0, la ecuación se verá como Ax + Vy + Cz = 0, lo que significa que el plano se cruza con O (origen).
- Cuarto, si A = B = 0, entonces la ecuación cambiará a Cz + D = 0, lo que resultará paralelo a Oxy.
- Quinto, si B = C = 0, entonces la ecuación se convierte en Ax + D = 0, lo que significa que el plano a Oyz es paralelo.
- Sexto, si A = C = 0, entonces la ecuación tomará la forma Vy + D = 0, es decir, reportará paralelismo a Oxz.
Vista de ecuación en segmentos de línea
En el caso de que los números A, B, C, D sean distintos de cero, la forma de la ecuación (0) puede ser la siguiente:
x / a + y / b + z / c = 1,
en el que a = -D / A, b = -D / B, c = -D / C.
Como resultado, obtenemos la ecuación del plano en segmentos. Vale la pena señalar que este plano intersecará el eje Ox en un punto con coordenadas (a, 0,0), Oy - (0, b, 0) y Oz - (0,0, c).

Teniendo en cuenta la ecuación x / a + y / b + z / c = 1, es fácil representar visualmente la ubicación del plano en relación con un sistema de coordenadas dado.
Coordenadas vectoriales normales
El vector normal n al plano P tiene coordenadas que son los coeficientes de la ecuación general de este plano, es decir, n (A, B, C).

Para determinar las coordenadas de la normal n, basta con conocer la ecuación general del plano dado.
Cuando se usa una ecuación de segmento de línea quetiene la forma x / a + y / b + z / c = 1, ya que cuando usa la ecuación general, puede escribir las coordenadas de cualquier vector normal de un plano dado: (1 / a + 1 / b + 1 / C).
Vale la pena señalar que el vector normal ayudaresolver varios problemas. Los problemas más comunes incluyen el problema de probar la perpendicularidad o paralelismo de los planos, el problema de encontrar los ángulos entre planos o los ángulos entre planos y líneas.
La forma de la ecuación del plano según las coordenadas del punto y el vector normal
Un vector n distinto de cero perpendicular a un plano dado se llama normal (normal) para un plano dado.
Supongamos que en el espacio de coordenadas (sistema de coordenadas rectangular) se dan Oxyz:
- punto Мₒ con coordenadas (xₒ, yₒ, zₒ);
- vector cero n = A * i + B * j + C * k.

Es necesario trazar una ecuación para un plano que pasará por el punto Mₒ perpendicular a la normal n.
En el espacio, elija cualquier punto arbitrario ylo denotamos por M (xy, z). Sea el vector de radio de cualquier punto M (x, y, z) r = x * i + y * j + z * k, y el vector de radio del punto Mₒ (xₒ, yₒ, zₒ) - rₒ = xₒ * i + yₒ * j + zₒ * k. El punto M pertenecerá al plano dado si el vector МₒМ es perpendicular al vector n. Escribamos la condición de ortogonalidad usando el producto escalar:
[MM, n] = 0.
Dado que МₒМ = r - rₒ, la ecuación vectorial del plano se verá así:
[r - rₒ, n] = 0.
Esta ecuación puede tener otra forma.Para ello, se utilizan las propiedades del producto escalar y se transforma el lado izquierdo de la ecuación. [r - rₒ, n] = [r, n] - [rₒ, n]. Si [rₒ, n] se denota como c, entonces obtenemos la siguiente ecuación: [r, n] - c = 0 o [r, n] = c, que expresa la constancia de las proyecciones sobre el vector normal de vectores de radio de puntos dados que pertenecen al plano.
Ahora puede obtener la forma de coordenadas de escribir la ecuación vectorial de nuestro plano [r - rₒ, n] = 0. Dado que r - rₒ = (x - xₒ) * i + (y - yₒ) * j + (z - zₒ ) * k, y n = A * i + B * j + C * k, tenemos:

Resulta que tenemos una ecuación de un plano que pasa por un punto perpendicular a la normal n:
A * (x- xₒ) + B * (y– yₒ) C * (z - zₒ) = 0.
La forma de la ecuación del plano según las coordenadas de dos puntos y un vector colineal al plano
Establezcamos dos puntos arbitrarios M ′ (x ′, y ′, z ′) y M ″ (x ″, y ″, z ″), así como un vector a (a ′, a ″, a).
Ahora podremos trazar una ecuación para un plano dado, que pasará por los puntos M ′ y M ″ existentes, así como cualquier punto M con coordenadas (x, y, z) paralelas a un vector dado a.
Además, los vectores M′M = {x-x ′; y-y ′; zz ′} y M ″ M = {x ″ -x ′; y ″ -y ′; z ″ -z ′} deben ser coplanarios con el vector a = (a ′, a ″, a ‴), lo que significa que (M′M, M ″ M, a) = 0.
Entonces, nuestra ecuación de un plano en el espacio se verá así:

Vista de la ecuación de un plano que cruza tres puntos
Digamos que tenemos tres puntos:(x ′, y ′, z ′), (x ″, y ″, z ″), (x, y ‴, z ‴) que no pertenecen a una línea recta. Es necesario escribir la ecuación del plano que pasa por los tres puntos dados. La teoría de la geometría afirma que este tipo de plano realmente existe, pero es el único e inimitable. Dado que este plano interseca el punto (x ′, y ′, z ′), la forma de su ecuación será la siguiente:

Aquí A, B, C son distintos de cero al mismo tiempo. Además, el plano dado interseca dos puntos más: (x ″, y ″, z ″) y (x ‴, y ‴, z ‴). En este sentido, se deben cumplir las siguientes condiciones:
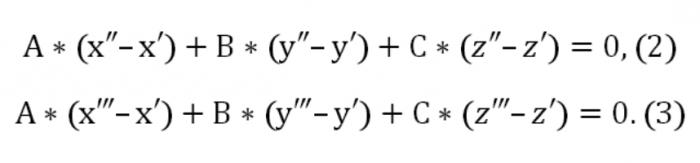
Ahora podemos componer un sistema homogéneo de ecuaciones (lineales) con incógnitas u, v, w:
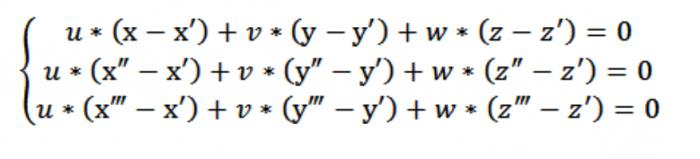
En nuestro caso, x, yoz es arbitrariopunto que satisface la ecuación (1). Considerando la ecuación (1) y el sistema de ecuaciones (2) y (3), el sistema de ecuaciones indicado en la figura anterior se satisface con el vector N (A, B, C), que no es trivial. Por eso el determinante de este sistema es igual a cero.

La ecuación (1), que obtuvimos, eses la ecuación del avión. Pasa exactamente por 3 puntos y es fácil de comprobar. Para hacer esto, necesitamos expandir nuestro determinante por los elementos ubicados en la primera línea. De las propiedades existentes del determinante se deduce que nuestro plano interseca simultáneamente tres puntos especificados inicialmente (x ′, y ′, z ′), (x ″, y ″, z ″), (x ‴, y ‴, z ‴) . Es decir, hemos resuelto la tarea que se nos planteó.
Ángulo diedro entre planos
El ángulo diedro esuna figura geométrica espacial formada por dos semiplanos que emanan de una línea recta. En otras palabras, esta es una parte del espacio que está limitado por estos semiplanos.
Digamos que tenemos dos planos con las siguientes ecuaciones:

Sabemos que los vectores N = (A, B, C) yN¹ = (А¹, В¹, С¹) son perpendiculares según los planos dados. En este sentido, el ángulo φ entre los vectores N y N¹ es igual al ángulo (diedro), que se encuentra entre estos planos. El producto escalar es:
NN¹ = | N || N¹ | cos φ,
precisamente porque
cosφ = NN¹ / | N || N¹ | = (AA¹ + BB¹ + CC¹) / ((√ (A² + B² + C²)) * (√ (A¹) ² + (B¹) ² + (C¹) ²)).

Basta tener en cuenta que 0≤φ≤π.
De hecho, dos planos que se cruzan forman dos ángulos (diedro): φ1 y φ2... Su suma es igual a π (φ1+ φ2= π). En cuanto a sus cosenos, sus valores absolutos son iguales, pero difieren en signos, es decir, cos φ1= -cos φ2... Si en la ecuación (0) reemplazamos A, B y C con los números -A, -B y -C, respectivamente, entonces la ecuación que obtenemos determinará el mismo plano, el único ángulo φ en la ecuación cos φ = NN1/ | N || N1| será reemplazado por π-φ.
Ecuación del plano perpendicular
Los planos se llaman perpendiculares, entrecuyo ángulo es de 90 grados. Usando el material descrito anteriormente, podemos encontrar la ecuación de un plano perpendicular a otro. Supongamos que tenemos dos planos: Ax + By + Cz + D = 0 y A¹x + B¹y + C¹z + D = 0. Podemos afirmar que serán perpendiculares si cosφ = 0. Esto significa que NN¹ = AA¹ + BB¹ + CC¹ = 0.
Ecuación de plano paralelo
Paralelos son dos planos que no contienen puntos comunes.
La condición para el paralelismo de los planos (sus ecuacioneslo mismo que en el apartado anterior) es que los vectores N y N¹, que son perpendiculares a ellos, son colineales. Esto significa que se cumplen las siguientes condiciones de proporcionalidad:
A / A¹ = B / B¹ = C / C¹.
Si se amplían las condiciones de proporcionalidad - A / A¹ = B / B¹ = C / C¹ = DD¹,
esto indica que estos planos coinciden. Y esto significa que las ecuaciones Ax + By + Cz + D = 0 y A¹x + B¹y + C¹z + D¹ = 0 describen un plano.
Distancia al plano desde el punto
Supongamos que tenemos un plano P, que está dadoecuación (0). Es necesario encontrar la distancia desde el punto con coordenadas (xₒ, yₒ, zₒ) = Qₒ. Para hacer esto, necesita llevar la ecuación del plano P a una forma normal:
(p, v) = p (p≥0).
En este caso, ρ (x, y, z) esvector de radio de nuestro punto Q, ubicado en P, p es la longitud de la perpendicular P, que se liberó desde el punto cero, v es el vector unitario, que se ubica en la dirección a.
La diferencia ρ-ρº del vector de radio de algún punto Q = (x, y, z), perteneciente a P, así como el vector de radio de un punto Q dado0= (xₒ, yₒ, zₒ) es un vector de este tipo, el valor absoluto de cuya proyección en v es igual a la distancia d, que debe calcularse a partir de Q0= (xₒ, yₒ, zₒ) a P:
D = | (ρ-ρ0, v) |, pero
(ρ-ρ0, v) = (ρ, v) - (ρ0, v) = р– (ρ0, v).
Entonces resulta
d = | (ρ0, v) -p |.
Ahora visto para calcular la distancia d desde Q0 al plano P, debe usar la forma normal de la ecuación del plano, mientras se transfiere al lado izquierdo de p, y sustituye (xₒ, yₒ, zₒ) en el último en lugar de x, y, z.
Así, encontraremos el valor absoluto de la expresión resultante, es decir, la d deseada.
Usando el lenguaje de parámetros, obtenemos lo obvio:
d = | Axₒ + Byₒ + Czₒ | / √ (A² + B² + C²).
Si un punto dado Q0 se encuentra al otro lado del plano P, así como el origen de las coordenadas, luego entre el vector ρ-ρ0 y v es un ángulo obtuso, por lo tanto:
d = - (ρ-ρ0, v) = (ρ0, v) -p> 0.
En el caso de que el punto Q0 junto con el origen de coordenadas se encuentra en el mismo lado de P, entonces el ángulo creado es agudo, es decir:
d = (ρ-ρ0, v) = р - (ρ0, v)> 0.
Como resultado, resulta que en el primer caso (ρ0, v)> р, en el segundo (ρ0, v) <p.
El plano tangente y su ecuación
El plano tangente a la superficie en el punto de tangencia Mº es el plano que contiene todas las posibles tangentes a las curvas dibujadas a través de este punto en la superficie.
Con esta forma de la ecuación de la superficie F (x, y, z) = 0, la ecuación del plano tangente en el punto tangente Mº (xº, yº, zº) se verá así:
FX(xº, yº, zº) (x- xº) + FX(xº, yº, zº) (y- yº) + FX(xº, yº, zº) (z-zº) = 0.
Si establecemos la superficie en forma explícita z = f (x, y), entonces el plano tangente será descrito por la ecuación:
z-zº = f (xº, yº) (x- xº) + f (xº, yº) (y-yº).
Intersección de dos planos
El sistema está ubicado en un espacio tridimensionalcoordenadas (rectangulares) Oxyz, se dan dos planos P ′ y P ″, que se cruzan y no coinciden. Dado que cualquier plano en un sistema de coordenadas rectangular está determinado por la ecuación general, asumiremos que P ′ y P ″ están dados por las ecuaciones Ax + B′y + C′z + D ′ = 0 y A ″ x + B ″ y + C ″ z + D ″ = 0. En este caso, tenemos la normal n ′ (A ′, B ′, C ′) del plano P ′ y la normal n ″ (A ″, B ″, C ″) del plano P ″. Dado que nuestros planos no son paralelos y no coinciden, estos vectores no son colineales. Usando el lenguaje de las matemáticas, podemos escribir esta condición de la siguiente manera: n ′ ≠ n ″ ↔ (A ′, B ′, C ′) ≠ (λ * A ″, λ * B ″, λ * C ″), λϵR. Supongamos que la línea recta que se encuentra en la intersección de P ′ y P ″ se indicará con la letra a, en este caso a = P ′ ∩ P ″.
a es una línea recta que consta de un conjunto de todos los puntosplanos (comunes) P ′ y P ″. Esto significa que las coordenadas de cualquier punto perteneciente a la recta a deben satisfacer simultáneamente las ecuaciones A'x + B'y + C'z + D '= 0 y A ″ x + B ″ y + C ″ z + D ″ = 0. Esto significa que las coordenadas del punto serán una solución particular del siguiente sistema de ecuaciones:

Como resultado, resulta que la solución (general) de esteel sistema de ecuaciones determinará las coordenadas de cada uno de los puntos de la recta, que actuará como punto de intersección de P ′ y P ″, y determinará la recta a en el sistema de coordenadas Oxyz (rectangular) en el espacio.